



编号:
T5152310M-FZ
设计简介:
本设计是多功能智能手杖设计,主要实现以下功能:
通过超声波传感器检测距离,进行障碍物检测
通过GPS模块进行经纬度定位
通过MPU6050模块检测是否摔倒
通过DHT11检测环境温湿度
通过OLED显示屏显示经纬度,温湿度,前方距离以及摔倒情况
通过SU-03T进行障碍物和跌倒播报
通过按键来控制USB补光灯进行补光以及配网和跌倒复位
通过WiFi模块进行手机端远程监控
电源: 5V
传感器:超声波传感器(HC-SR04)、温湿度传感器(DHT11)、姿态传感器(MPU6050)、GPS定位(NEO-7M)
显示屏:OLED12864
单片机:STM32F103C8T6
执行器:USB灯(三极管),语音播报(SU-03T)
人机交互:独立按键,腾讯云WiFi(ESP8266)
标签:STM32、OLED12864、HC-SR04、DHT11,MPU6050,NEO-7M,SU-03T,USB灯,独立按键,ESP8266
题目扩展:智能空调系统、智能排风扇系统
视频演示:
实物链接:
开题报告链接
设计说明书链接:
软件安装:
资料预览
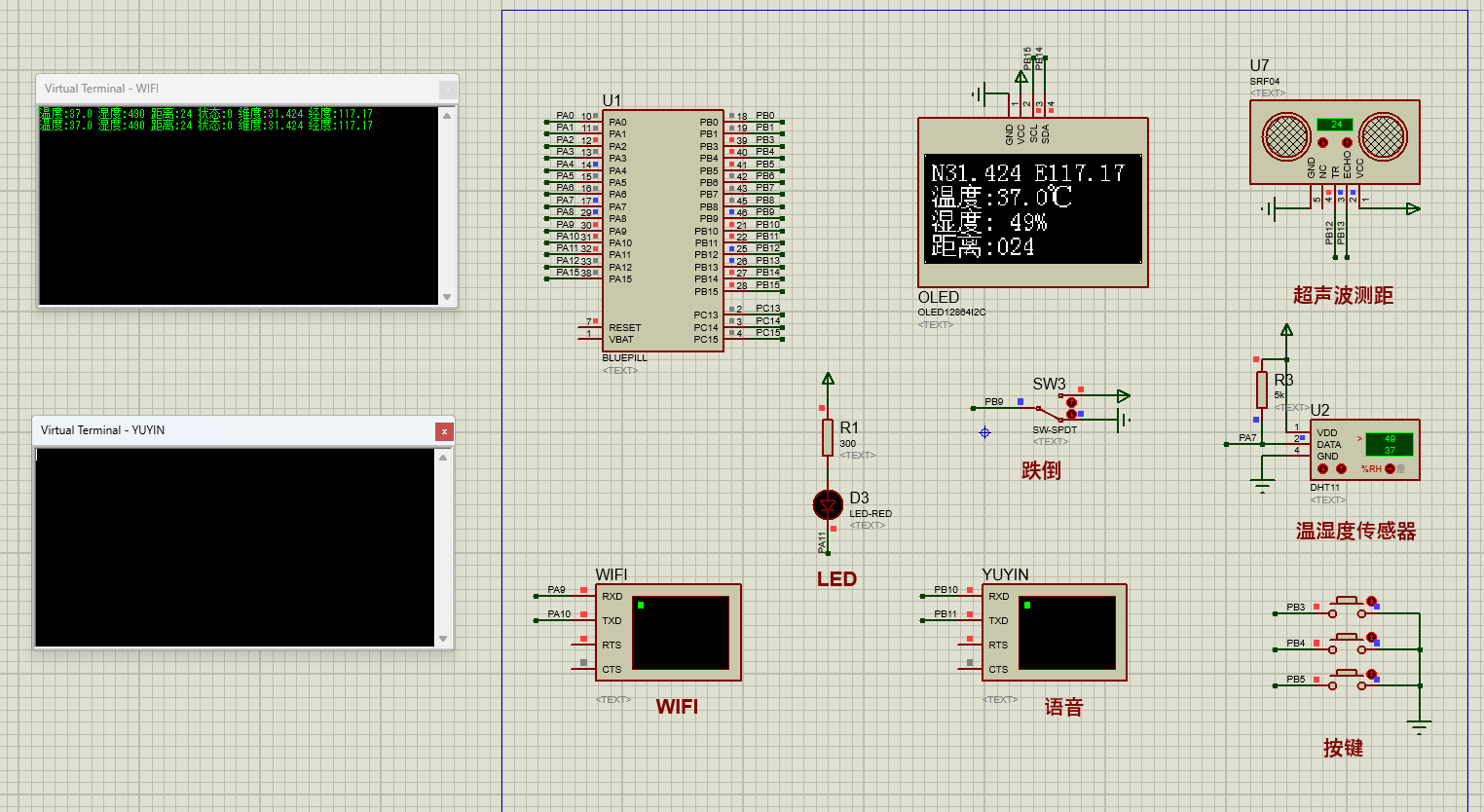
效果图:
总体资料:
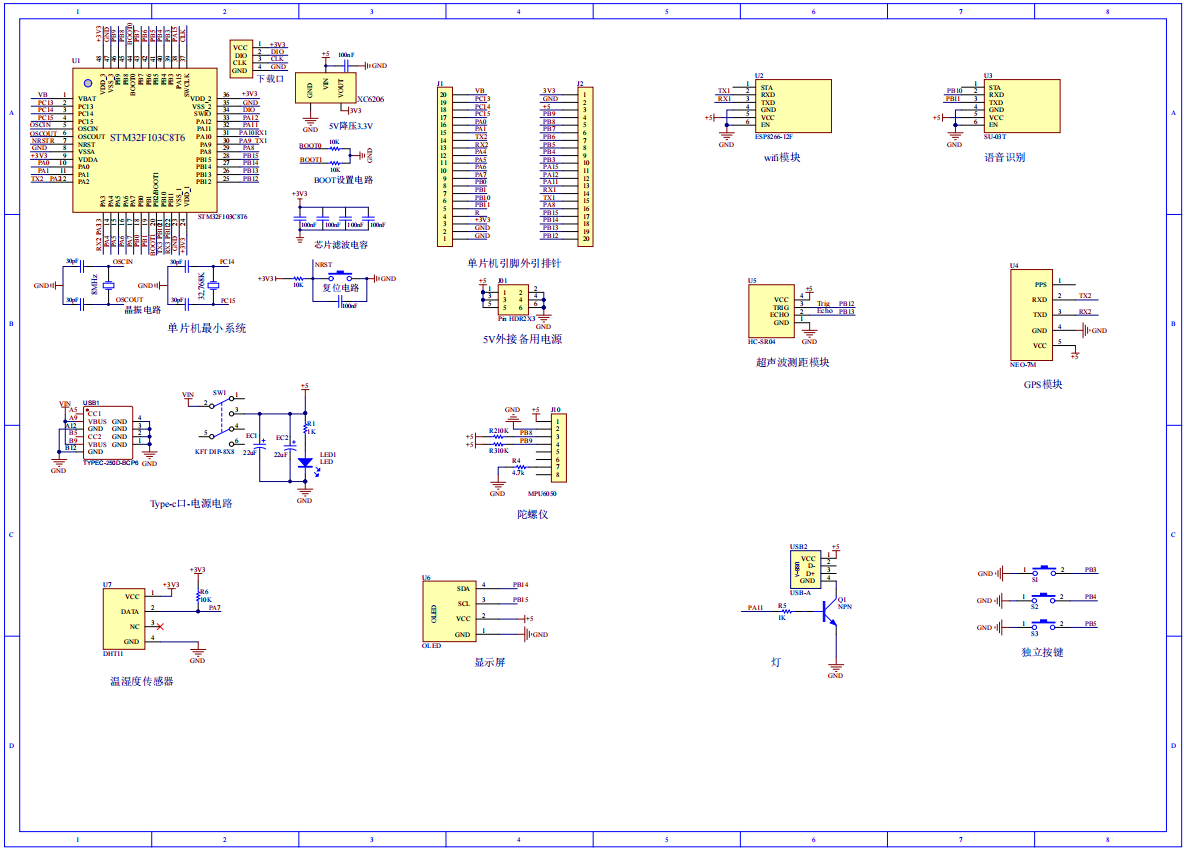
原理图:
软件设计流程:
系统框图:
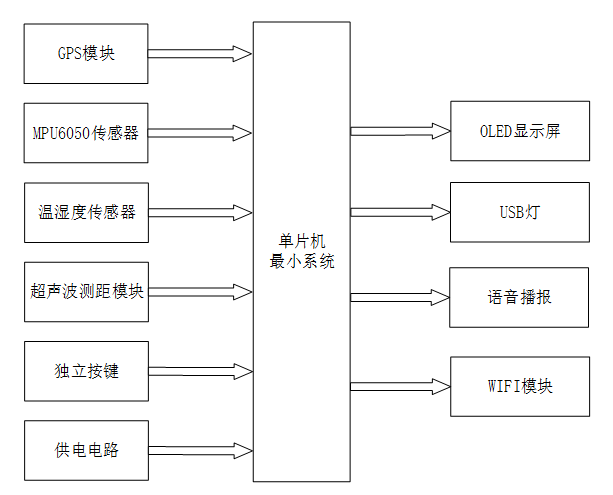
本设计以STM32单片机为核心控制器,加上其他的模块一起组成基于STM32的多功能手杖的整个系统,其中包含中控部分、输入部分和输出部分。中控部分采用了STM32F103单片机,其主要作用是获取输入部分数据,经过内部处理,控制输出部分。输入由六部分组成,第一部分是GPS模块,用于检测老人的经纬度位置;第二部分是六轴加速度传感器,用于检测是否摔倒;第三部分是温湿度传感器,用于检测温湿度值;第四部分是超声波测距模块,用于检测距离障碍物距离;第五部分是独立按键,用于进行配网、开关灯、跌倒复位。第六部分是供电电路,给整个系统供电。
输出由四部分组成,第一部分是OLED显示屏,显示经纬度、距离、摔倒情况以及温湿度值;第二部分是USB灯,可以按键开关灯,进行照明;第三部分是SU-03T语音播报,当跌倒在时间内未站起,语音求助,若前方有障碍物,语音提示避障;最后一部分是WIFI 模块,将获取数据上传至云平台端显示。
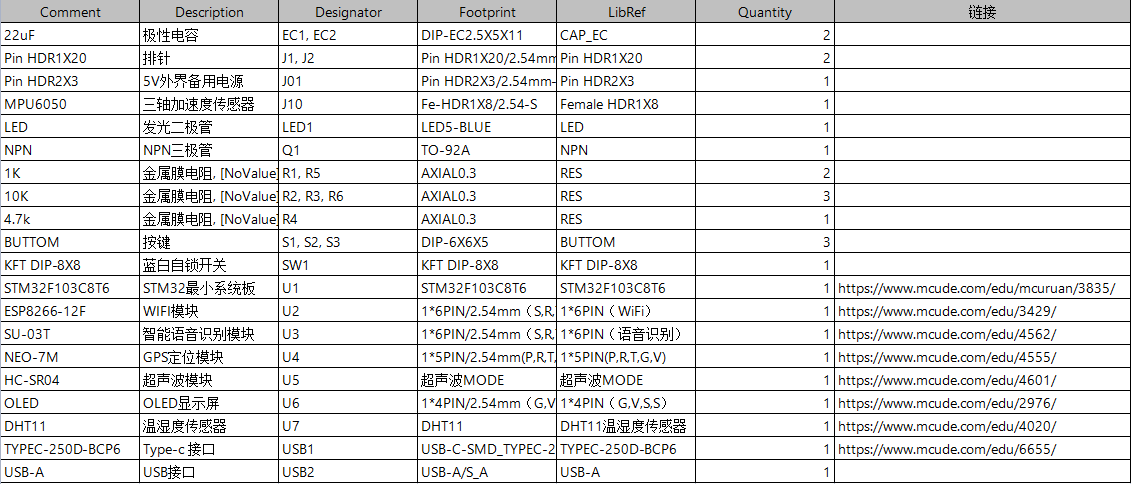
硬件清单: