










首页 实物视频演示 仿真视频演示 设计说明书预览 答辩PPT预览
编号:
T1342310M
设计简介:
本设计是基于单片机的智能导盲杖系统设计,主要实现以下功能:
通过陀螺仪传感器检测老人是否跌倒
通过超声波模块检测前方距离
通过水位传感器检测前方积水情况
通过GPS模块获取老人的经纬度信息
通过GSM模块向手机发送短信“请注意,老人摔倒!”及gps定位
通过语音播报模块提醒老人前方障碍物,积水情况,及摔倒求助
若老人在外摔倒时蜂鸣器警告以及led灯闪烁提醒路人帮扶老人,若是弯腰等情况导致假警告,可自行取消
通过oled显示经纬度,前方距离等信息
通过按键和WiFi模块进行腾讯云配网,连接小程序远程监控
电源: 5V
传感器:陀螺仪传感器(MPU6050)、超声波模块(HC-SR04),水位传感器(Water Sensor)
显示屏:OLED12864
单片机:STM32F103C8T6
执行器:蜂鸣器,语音播报模块(DY-SV17F)
人机交互:独立按键,GPS模块(NEO-6M),GSM模块(SIM900A),WiFi模块(ESP8266)
标签:STM32、OLED12864、MPU6050、HC-SR04、DY-SV17F、NEO-6M、SIM900A,Water Sensor,ESP8266
题目扩展:基于stm32的老人健康监测系统设计、基于物联网的老人跌倒监测系统设计、智能老人拐杖系统
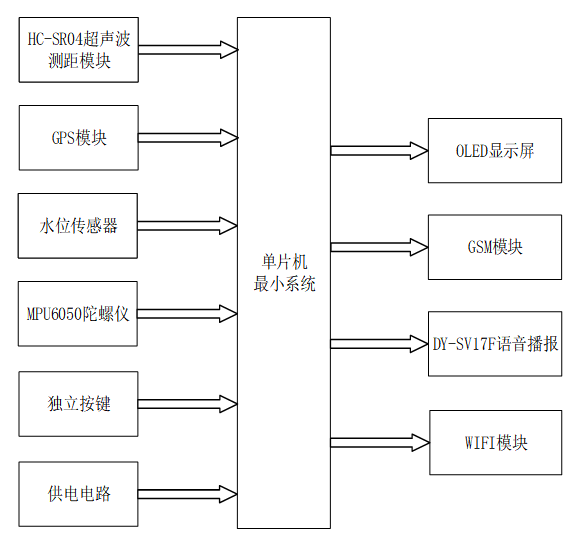
基于单片机的智能导盲杖系统设计可以分为三个主要部分:中控部分、输入部分和输出部分。下面分别对这三部分进行概述:
中控部分
概述:中控部分是智能导盲杖系统的核心,采用了STM32单片机作为主控制器。它的主要任务是接收来自输入部分的数据,进行内部处理和分析,然后根据处理结果控制输出部分执行相应的操作。STM32单片机以其高性能、低功耗和丰富的外设接口,为系统的稳定运行提供了有力保障。
输入部分
1. HC-SR04超声波测距模块:
- 功能:用于实时检测导盲杖前方障碍物的距离,确保老人在行走过程中能够提前感知并避开障碍物。
- 工作原理:通过发射超声波并接收其反射回来的信号,计算障碍物与导盲杖之间的距离。
2. GPS模块:
- 功能:获取老人的实时经纬度位置信息,为紧急情况下的定位提供帮助。
- 工作原理:接收来自卫星的信号,经过内部处理,输出准确的经纬度数据。
3. 水位传感器:
- 功能:检测路面是否存在积水,避免老人因误入积水区域而摔倒。
- 工作原理:通过感应电极与水的接触状态,输出相应的电平信号。
4. MPU6050陀螺仪:
- 功能:检测老人是否摔倒,以便及时触发紧急求助机制。
- 工作原理:利用陀螺仪和加速度计的组合,实时监测老人的姿态变化,判断是否存在摔倒行为。
5. 独立按键:
- 功能:用于进行WiFi配网操作,方便老人或监护人将导盲杖连接到云平台进行远程监控。
- 工作原理:通过按下按键,触发内部电路,向STM32单片机发送配网指令。
6. 供电电路:
- 功能:为整个系统提供稳定的电源供应,确保各模块能够正常工作。
- 工作原理:通过电池或外接电源,将电能转换为系统所需的电压和电流。
输出部分
1. OLED显示屏:
- 功能:显示老人的经纬度位置、前方障碍物距离、积水情况以及是否摔倒等关键信息。
- 工作原理:接收STM32单片机的数据,通过内部驱动电路,在屏幕上显示相应的字符和图形。
2. GSM模块:
- 功能:在老人摔倒时,自动发送包含经纬度位置的求助短信给监护人。
- 工作原理:接收STM32单片机的指令,通过移动通信网络,将短信发送到预设的手机号上。
3. DY-SV17F语音播报模块:
- 功能:通过语音提示老人前方有积水、需要避障或已触发摔倒求助机制等信息。
- 工作原理:接收STM32单片机的语音指令,通过内部音频电路,将语音信息播放出来。
4. ESP8266 WiFi模块:
- 功能:通过WiFi连接云平台,将导盲杖获取的数据进行上传,实现远程监控和数据分析。
- 工作原理:接收STM32单片机的数据,通过WiFi网络,将数据发送到云平台服务器。