










首页 实物视频演示 设计说明书预览 答辩PPT预览
编号:
T1632305M
设计简介:
本设计是基于STM32的智能送餐桌,主要实现以下功能:
1.实现送餐车的移动、菜品点餐,菜品上菜、语音提示,返回。
2.通过循迹模块进行循迹,循迹进行送餐,根据黑线进行行走。
3.通过超声波进行避障,并通过蜂鸣器进行报警提示
4.可设置两个RFID站点,餐桌1和餐桌2、当小车经过这个点的时侯,停下来。餐客可以进行点餐,(按键和显示屏进行点餐),小车点餐后,继续前行,餐桌2点餐结束后可反回取餐,然后到达指定地点,进行送餐和提醒。
5.采用重量传感器来测量车上的重物信息,达到终点后会发声进行提示取餐;
6.可通过显示屏显示内容
电源: 5V
传感器:红外循迹模块(TCRT5000)、超声波测距模块(HC-SR04)、压力传感器(HX711)、RFID模块(RC522)
显示屏:OLED12864
单片机:STM32F103C8T6
执行器:直流电机(SDC9150)、有源蜂鸣器、语音模块(SU-03T)
人机交互:独立按键
标签:STM32F103C8T6、OLED12864、TCRT5000、HC-SR04、HX711、RC522、独立按键、有源蜂鸣器、SDC9150、SU-03T
题目扩展:消防小车、RFID小车
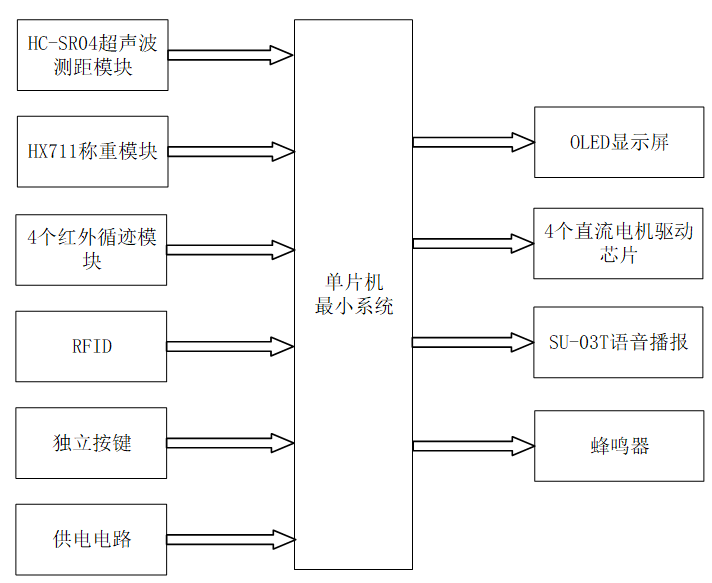
智能送餐车的设计:中控部分、输入部分和输出部分。下面分别对这三部分进行概述:
中控部分概述:
中控部分是智能送餐车设计的核心,采用了STM32单片机作为控制器。它的主要功能是接收来自输入部分的各种数据,如超声波测距、重量检测、红外循迹、RFID识别、按键输入以及供电状态等。STM32单片机对这些数据进行内部处理,根据预设的算法和逻辑,产生相应的控制指令,发送给输出部分,实现送餐车的自主导航、避障、点餐、送餐及语音提示等功能。
输入部分概述:
- HC-SR04超声波测距模块:用于检测送餐车与前方障碍物的距离,确保送餐车在遇到障碍物时能够及时避让。
- HX711称重模块:用于检测送餐车上所装载菜品的重量,以便在到达送餐点时准确提示顾客取餐。
- 4个红外循迹模块:分别安装在送餐车的四周,用于识别并跟踪预设的行驶路线,确保送餐车能够准确到达指定的送餐点。
- RFID模块:用于识别不同的送餐点位置,当送餐车到达某个送餐点时,RFID模块会发出信号,触发点餐或送餐操作。
- 独立按键:提供点餐、出餐等功能的按钮输入,方便顾客和餐厅工作人员进行操作。
- 供电电路:为整个系统提供稳定的电源,确保系统能够持续稳定运行。
输出部分概述:
- OLED显示屏:用于显示餐桌选择、点餐流程、菜品信息等内容,方便顾客查看和操作。
- 4个直流电机驱动芯片:分别控制送餐车的四个轮子,实现送餐车的前进、后退、左转、右转等运动。
- SU-03T语音播报模块:用于播报点餐提示语、餐品送达提示语以及遇到障碍物时的避障提示语,增强系统的交互性和用户体验。
- 蜂鸣器:在送餐车遇到障碍物时发出声音提示,提醒系统或操作人员注意避障。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。