










首页 实物视频演示 仿真视频演示 设计说明书预览 答辩PPT预览
实物视频演示:
软件安装:


资料预览
效果图:

总体资料:

原理图:

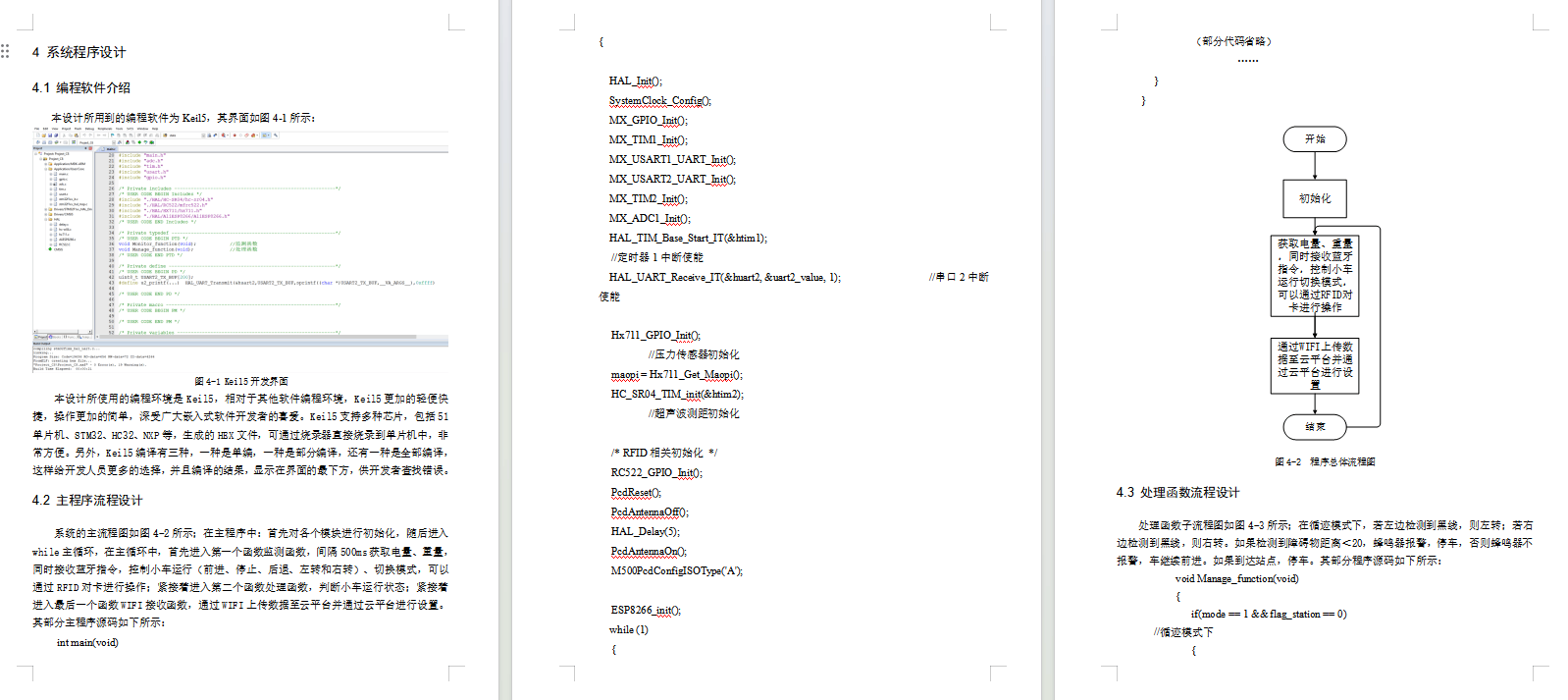
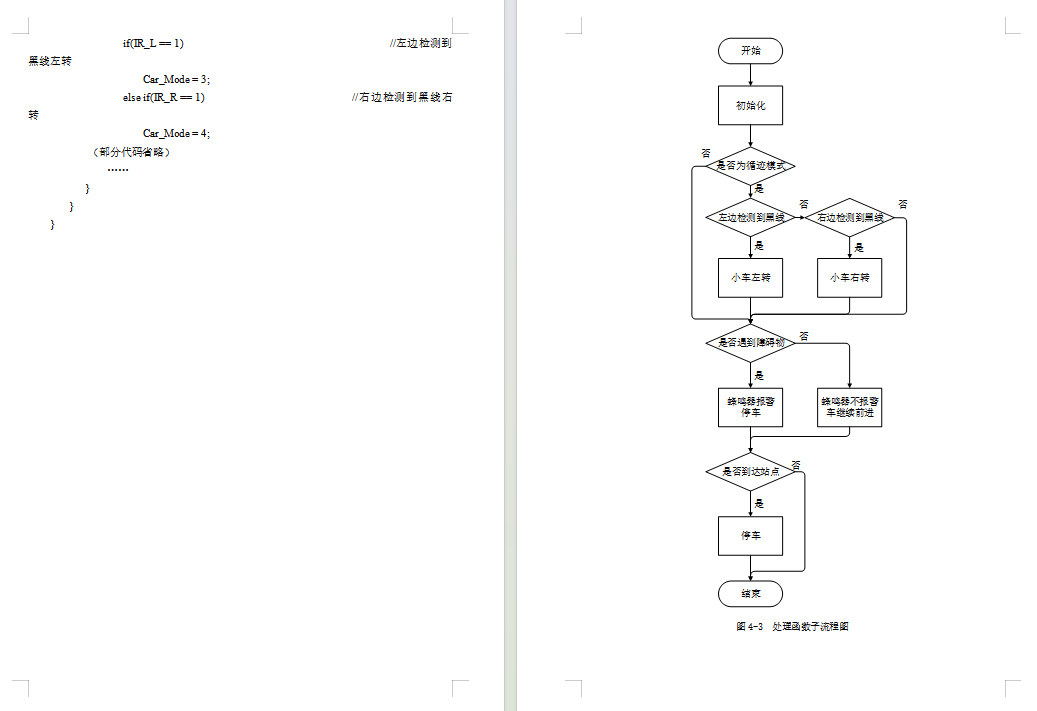
软件设计流程:
系统框图:
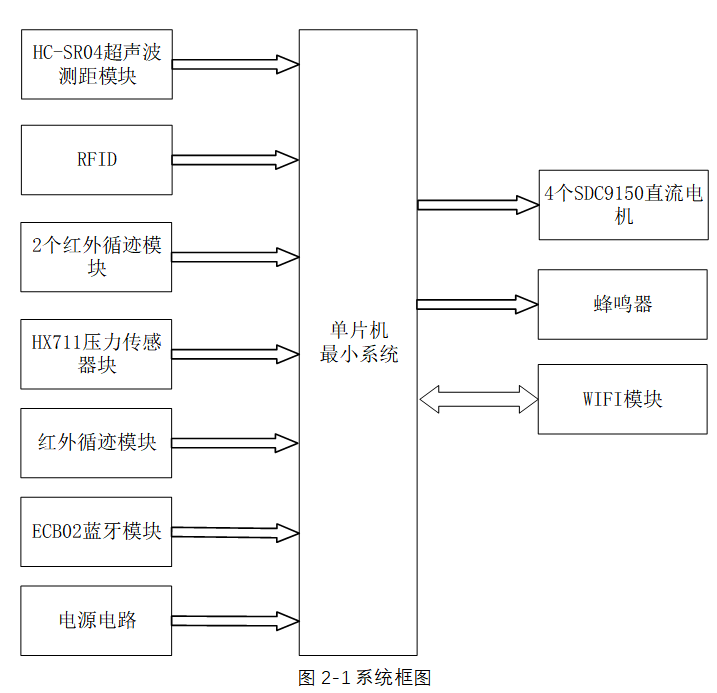
本设计以STM32F103单片机为核心控制器,加上其他的模块一起组成基于单片机的循迹避障小车的整个系统,其中包含中控部分、输入部分和输出部分。中控部分采用了STM32F103单片机,其主要作用是获取输入部分数据,经过内部处理,控制输出部分。输入由七部分组成,第一部分是HC-SR04超声波测距模块,用于检测距离;第二部分是RFID,用于读取卡片,获取站点信息;第三部分是2个红外循迹模块,使小车按照指定路线运行。第四部分是HX711压力传感器,用于检测小车是否载物;第五部分是单个红外循迹传感器;第六部分是ECB02蓝牙模块,通过该模块连接手机,在手机上控制小车的运行、切换模式;第七部分是电源电路电,给整个系统供电。输出由三部分组成,第一部分是4个SDC9150直流电机,用于驱动小车运行;第二部分是蜂鸣器,当遇到障碍物或设定卡成功时,蜂鸣器会响;第三部分是WIFI模块,通过WIFI连接云平台上传小车当前电量值、是否载物以及识别的卡号等,切换模式、需要到达站点。
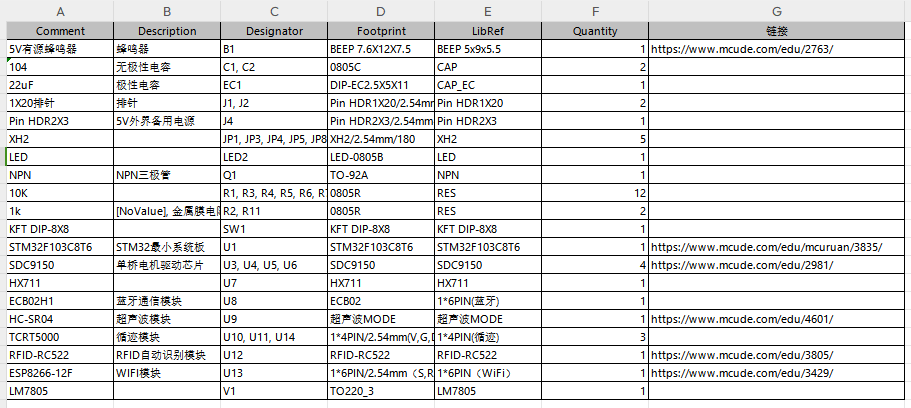
硬件清单:
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。